
迪士尼宝宝和迪士尼是一个牌子吗(迪士尼宝宝故事会)
迪士尼宝宝和迪士尼是一个牌子吗(迪士尼宝宝故事会) 迪士尼宝宝和迪士尼是一个牌子吗?这是一个广大家长常常问到的问题。首先,我们需要明确迪士尼是一个跨媒体娱乐公司,而迪...
2023-10-24 06:04:26


电子陀螺仪工作原理(电子陀螺仪原理与构造)
电子陀螺仪工作原理是通过电子信号控制陀螺仪的运动,从而实现精确定位。这种 *** 可以用于航空航天领域,例如飞机的导航系统。但是,由于其复杂性,目限于军事应用。然而,随着技术的发展,人们开始寻找一种更简单的 *** 来解决这个问题。近日,美国麻省理工学院的研究人员发明了一一款新型电池,可以在不使用任何化学物质的情况下实现快速充电。这种电池被命名为solar-1,它的工作原理类似于锂离子电池。
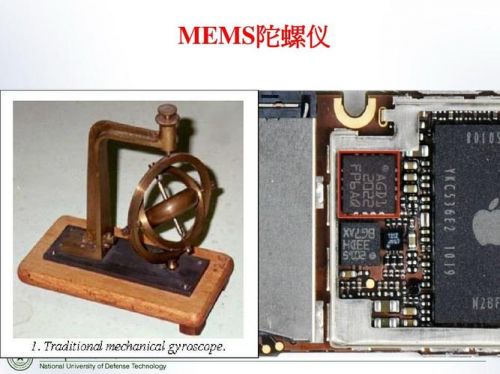
电子陀螺仪原理是一种用来感测与维持方向的装置,基於角动量不灭的理论设计出来的。陀螺仪主要是由一个位於轴心可以旋转的轮子构成。 陀螺仪一旦开始旋转,由於轮子的角动量,陀螺仪有抗拒方向改变的趋向。陀螺仪多用於导航、定位等系统。
电子陀螺仪原理是机械式陀螺仪的进化,机械式是利用真实的陀螺等机械 *** 的,而电子是利用芯片来实现陀螺仪的功能,其工作原理类似(电子只不过是模拟出来的而已)。
答:手机陀螺仪工作原理:通俗地说,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。大家如果玩过陀螺就会知道,旋转的陀螺遇到外力时,它的轴的方向是不会随着外力的方向发生改变的。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
优质回答1:
手机陀螺仪工作原理:通俗地说,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。大家如果玩过陀螺就会知道,旋转的陀螺遇到外力时,它的轴的方向是不会随着外力的方向发生改变的。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
优质回答2:
手机的陀螺仪原理如下:
1.
手机陀螺仪是有活动部件的
2.
硅陀螺会让一个细微的机械结构使用静电力驱动起来。
3.
振动起来后,如果发生旋转,会因为柯氏力在正交方向上产生位移,产生电容变化。这个位移与转动角速度成正比。
4.
检测这个电容变化,转换成数字信号,经过dsp,就可以给ap处理了。
优质回答1:
1. 惯性导航系统 INS( Inertia Navigation System,以下简称惯导)
惯导是一种利用惯性传感器测量载体的比力及角速度信息,并结合给定的初始条件实时推算速度、位置、姿态等参数的自主式导航系统.具体来说惯性导航系统属于一种推算导航方式。即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。
常规惯性导航系统采用加速度计和陀螺仪传感器来测量载体参数,而加速度计惯性导航系统主要由加速度计组成,该系统舍弃陀螺仪,用加速度计代替陀螺仪作为惯性测量元件,国际上有学者研究用多个加速度计替代陀螺仪的方案。
惯导中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次和分得到速度,速度再经过对时间的一次积分即可得到距离。
惯性导航系统有如下主要优点:
(1)由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好已不受外界电磁干扰的影响;
(2)可全天流全球、全时间地工作于空中地球表面乃至水下;
(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低;
(4)数据更新率高、短期精度和稳定性好。
其缺点是:
(1)由于导肮伯息经过积分而产生,定位误差随时间而增大,长期精度差;
(2)每次使用之前需要较长的初始对准时间;
(3)设备的价格较昂贵;
(4)不能给出时间信息。
2.加速度计:
加速度计有两种:一种是角加速度计,是由陀螺仪(角速度传感器)改进的。另一种就是线加速度计。
加速度传感器利用重力加速度,可以用于检测设备的倾斜角度,但是它会受到运动加速度的影响,使倾角测量不够准确,所以通常需利用陀螺仪和磁传感器补偿。同时磁传感器测量方位角时,也是利用地磁场,当系统中电流变化或周围有导磁材料时,以及当设备倾斜时,测量出的方位角也不准确,这时需要用加速度传感器(倾角传感器)和陀螺仪进行补偿。
优质回答2:
惯性陀螺仪的原理是当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。所谓的“转动惯量”,是描述刚体在转动中的惯性大小的物理量。
当以相同的力矩分别作用于两个绕定轴转动的不同刚体时,它们所获得的角速度一般是不一样的,转动惯量大的刚体所获得的角速度小,也就是保持原有转动状态的惯性大;反之,转动惯量小的刚体所获得的角速度大,也就是保持原有转动状态的惯性小。
2023-10-24 06:04:26

2023-10-24 06:02:11
2023-10-24 05:59:56
2023-10-24 05:57:41

2023-10-24 05:55:26

2023-10-23 22:26:20

2023-10-23 22:24:05

2023-10-23 22:21:50
2023-10-23 22:19:35

2023-10-23 22:17:20

2023-10-23 22:15:05

2023-10-23 22:12:50

2023-10-23 22:10:35

2023-10-23 22:08:20

2023-10-23 22:06:05
2023-10-23 07:09:58

2023-10-23 07:07:43
2023-10-23 07:05:28

2023-10-23 07:03:12

2023-10-23 07:00:57